Single-Pixel Imaging
The single-pixel camera developped at Rice University is an example of how
compressive sensing allows us to move from a "Digital Signal Processing" (DSP)
paradigm to a "Computational Signal Processing" (CSP)
paradigm (Takhar, 2006). In this new paradigm, analog signals are no longer sampled
periodically, but they are converted to a new representation, on which
further processing is based.
Apart from being an example of compressive sensing, such a single-pixel camera
is also arguably useful when
the detector is expensive and N-pixel arrays cannot be
built. Time-multiplexing a single detector is then a cost-effective
solution. For example, silicon is blind in the infrared, so CCD and CMOS
technologies cannot be used. A classical camera in the infrared is hundred times
more expensive than a digital camera for the visible (Duarte,
2008).
Hardware
Digital Micromirror Device (DMD) were used. The DMD consists of an array (1024*768) of
electrostatically actuated micro-mirrors. Each mirror can be positioned
in one of two states (+/- 12 degrees). Light will be collected by the
subsequent lens if the mirror is in the +12 degrees state.
As a sidenote, DMD Discovery 1100 by Texas Instrument costs $6000 in the visible, $6700 in the
near infrared, and $8700 in the ultra-violet.The accessory light
modulator package (ALP) was used, which costs $7650. So this infrared
camera costs already more than $15000 (http://www.dlinnovations.com/).
The DMD could be replaced by a MEMS-based shutter array placed direclty
over the photodiode (Takhar 06).
Figure 1:
Single-pixel camera block diagram (From http://www.dsp.ece.rice.edu/cscamera/)
Analysis
Using a modified Walsh basis extends the dynamic range D (required
for each single pixel of an N pixel array) to ND/2 since each Walsh basis
test function has N/2 entries with value 1 (Duarte, 2008). So much
light per measurement reduces dark current. However,if a smaller dynamic
range is desirable, it seems that a sparse basis could be used (Berinde,
2008). The trade-off between dark
current and dynamic range will determine the appropriate
sparsity. random_sp.m can be used to generate such bases.
The quantization error scales with the dynamic range. log(D'/D) additional bits
are required to keep the same error. If D'=ND/2, and N = 256, it makes 8
additional bits. If D' = 8N ( with the 8-sparse basis proposed above),
it makes 3 additional bits.
The photon counting noise (Poisson noise) depends on the chosen basis (i.e. how many photons are
wasted). The error due to Poisson noise will be affected by the
reconstruction method (Duarte, 2008).
Simulations
Below are some real images acquired with the single-pixel camera. More images can be
found here. Imperfections of the system contribute to additive noise in the obtained images: subtle
nonlinearities in the photodiode, nonuniformity of the mirrors
(reflectance and position), quantization noise at the A/D convertor,
circuit noise in the photodiode. The reconstruction should alleviate
quantization noise and circuit noise.
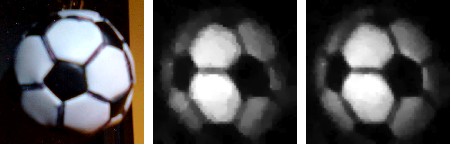
Figure 2:
Picture from a 'normal' digital camera (Left). Picture from the
single-pixel camera (Middle K=800 measurements, Right K=1600, the
reconstructed images have 64*64=4096 pixels).
We performed simulations of compressive sensing, first in an
optics-free case and then using the digital camera simulator ISET. Outside of the DMD which we believe was this one, none of the optical properties of the single-pixel camera were available. We took the following numbers: for the first lens f (focal length) 0.08m, F number 4; for the second lens f 0.1m, F number 4; the photodiode is a single 2.8um*2.8um pixel with integration time 0.101s and geometric efficiency 85% (which does not matter that much since there is a single pixel); we assumed monochromatic light, illuminance 90 cd/m2, and 12 bit digitization. Losses at the DMD were not simulated. For all simulations below, we took K=1024 measurements of a 64 by 64 Shepp-Logan phantom
(N=4096). Note that the reconstruction will work better as N becomes
bigger.
For the optics-free simulations, we looked at different measurement
matrices.We got almost perfect reconstructions with all of them.
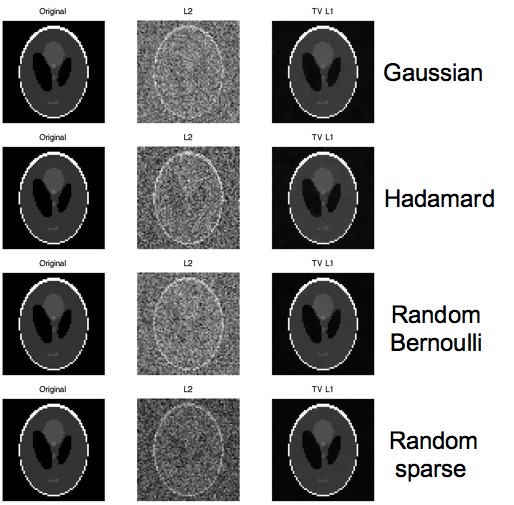
Figure 3:
Optics-free simulations with different measurement matrices. The l2
norm (least squares) performs poorly in all cases. The l1 norm
minimization gives almost perfect reconstruction.
For the optics-limited simulations, we used the Hadamard-Walsh basis as measurement basis and adapted the dynamic
range accordingly. As mentioned above, alternative solutions could be found. The digitization is implemented
in a simple way which does not take the effective range of the signal
into account. Empirically, it has been found not to be a limiting
factor (Duarte, 2008). As in the optics-free case, the l1 reconstruction
outperforms by far the l2 reconstruction. However, the reconstruction is
not perfect anymore, as expected.
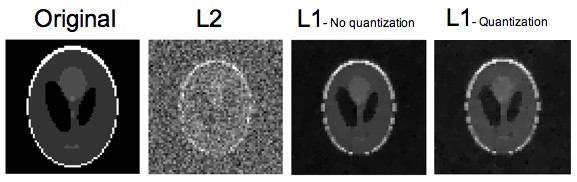
Figure 4:
Optics-limitics simulations with and without quantization. The l1
minimization reconstruction is much better than the least squares
reconstruction, but the phantom is not perfectly reconstructed anymore
because of the blur introduced by the two lenses.
In (Duarte, 2008) a Daubechies-4 wavelet basis is used for the sparse
reconstruction (i.e., as basis where the signal is known to be sparse). However, cscamera_test.m provided here is using the mesurement
matrix directly, so we believe that the original signal was assumed to
be sparse, without the need to do any transformation. We used the same
assumption in our simulations. We also tried to used the Fourier basis as sparse
basis (since the Shepp Logan phantom has a sparse Fourier
representation) but did not get good reconstruction so far (even in
the ideal case, without the optics), probably
because of the parameters used and the bad conditioning of the matrices. cscamera_test.m
is using a total variation minimization with quadratic constraints,
whereas we used a total variation minimization with equality
constraints and slightly different parameters. Our goal was not to
reproduce their results (since none of the optics was known anyway),
but to get an idea of the relative contribution of the reconstruction
and the optics to the imperfections seen. We have provided a framework
in which further, more precise simulations, could be performed.