| Home |
|---|
| Introduction |
| Approach |
| Methodology |
|
Verification of
Sensor Linearity |
|
Spectral Sensitivity |
| Resolution |
|
Chromatic Aberration |
| Summary |
| Acknowledgments |
| References |
| Appendix I: Code and Data |
Verification of Sensor Linearity
As discussed in the Methodology section, the linearity of the Nikon D70's sensor output was already verified by Moh, et al. All that remained was to verify the linearity of the Canon 300D's output. Figure 1 below shows the relevant data.
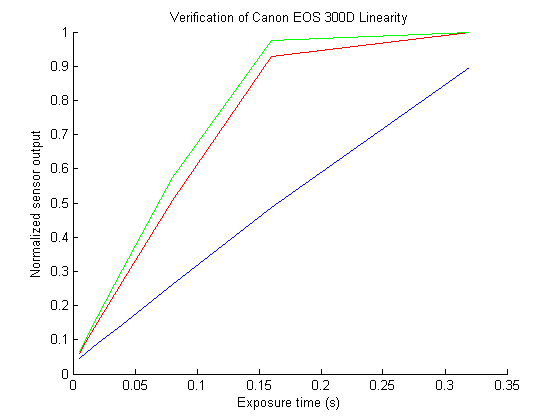
Note that the slopes of the lines from the three sensor types differ, and the G and B channels hit their saturation points at much lower exposures. Importantly, this is only because the illumination in the room where the data was collected was not "perfectly white" from the standpoint of the camera, and no white balance has been applied. This slope difference should not, therefore, be overinterpreted; a more effective way of collecting this type of data (such as that used in the previous characterization of the D70) would have prevented this distinction from arising.
Regardless, the data as it is shown here confirms what we needed to know, namely that the output from the CRW file can be read into MATLAB in such a way that it preserves the natural linearity of the CMOS sensor. Having verified this, we can proceed with more interesting analyses.