Hi Pass
Filter/Edge Detection
To preserve edges when scaling, we need to first detect where edges occur, then
enhance them before scaling up. The blurring effect of the interpolating filter
is averaged out with the enhanced edges. The resulting edge sharpness is perceptually
similar to the original.. The blurring effect and the edge detection is
shown in Fig 3. below.
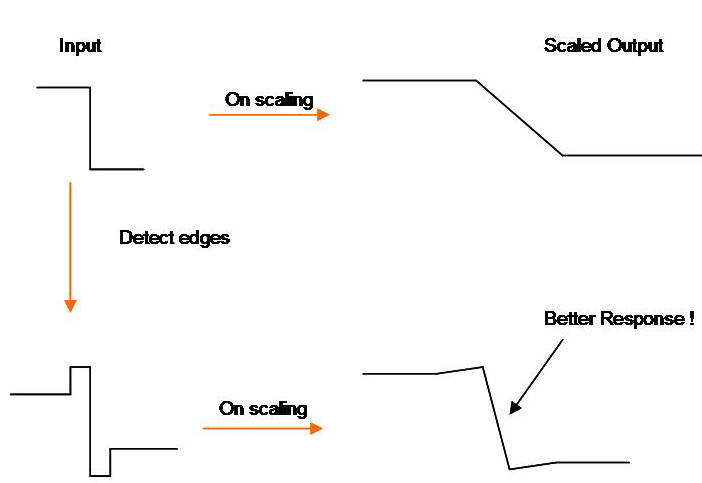
Fig 3: Edge Detection to improve blurring.
Edge detection is achieved with a high-pass filter. There are
various edge detection filters like,
which are all directional, meaning they detect edges in specific
directions. Operators that are able to detect all edges regardless of direction
are called "isotropic". This is achieved by using filters that operate on both
image axes simultaneously.
The most common isotropic edge detection filter is the
laplacian mask which is what we have chosen for this project. The laplacian
is a second order derivative given by equation 1:
 (1)
(1)
This can be represented by the convolution kernel:
[ -1
2 -1 ]
´
a
The multiplier 'a' is the scaling factor that
controls the extent of edge detection.
This is extended to two dimensions by multiplying the kernel with
its transpose as shown in Fig. 4.
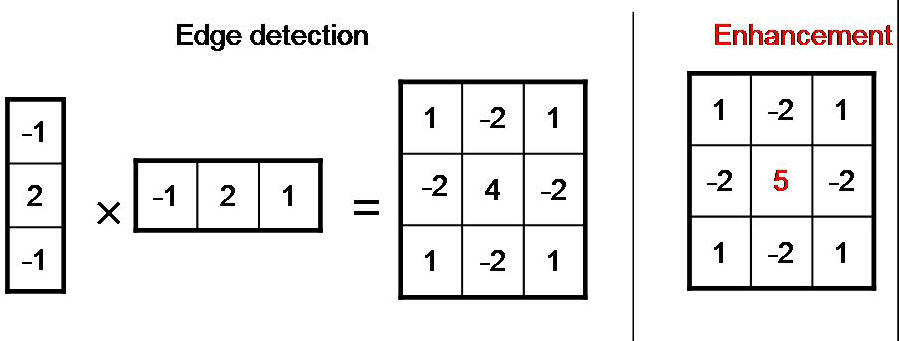
Fig 4: Edge detection convolution kernel.
In Fig 5 we can see how the second derivative detects edges.
Adding these detected edges to the original image enhances the edges on the
image. The effect of the blurring filter is then reduced as shown in Fig 6 , which
shows the image Lena, again scaled up by 3 in each dimension from 128 by 128.
This time the laplacian is used to enhance the edges. The improvement offered by
the edge detection filter should be apparent.
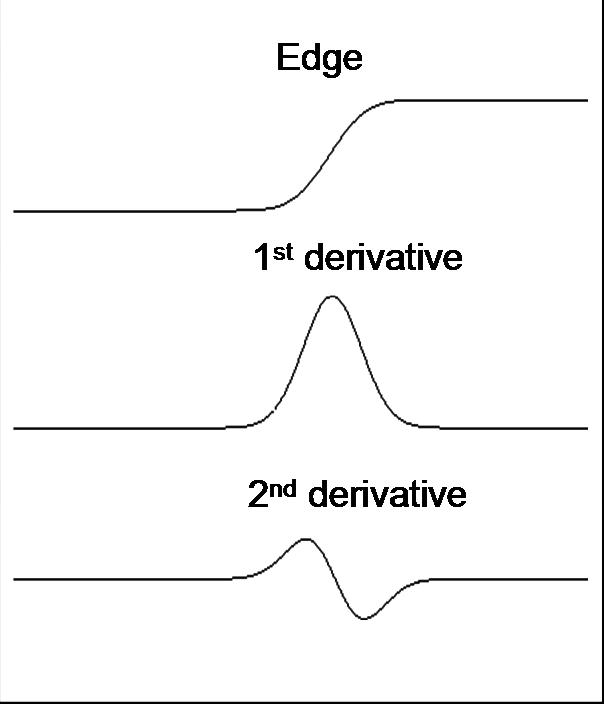
Fig 5: Second Derivative Edge Detection.
 Lena
Blurred
Lena
Blurred
 Lena with Enhanced Edges
Lena with Enhanced Edges
Figure 6: Lena Blurred & with Enhanced edges
The limitation of this edge-preservation method is that, if the
original image has a lot of shot noise (high-frequency), the noise is also
enhanced by the laplacian. After scaling this noise is amplified and could
result in a perceptual loss of quality rather than gain. The figure 7 below
shows the same edge-detection and scaling procedure on image Lena but with
additive Gaussian noise. The original image is still relatively
perceptually noiseless, However the noise has been amplified by the
edge-preservation/scaling algorithm.

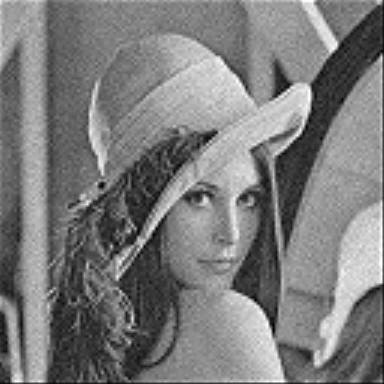
Fig 7: Up-scaling noisy image by 3 with edge detection. Noise
is also amplified.
Shot noise as shown above can be limited by low-pass filtering, effectively
smoothing out the noise.
Since the smoothing operation is linear across the entire image, the edges that
were to be preserved are also washed out by the Gaussian filter. So there is a
trade off between edge-preservation and noise reduction and this limits the
effectiveness of this method while scaling images. It is hence desirable to be
able to preserve edges while washing out noise. This can be achieved by a
non-linear filter that distinguishes between noise (filter out) and edges
(enhance). we explore the bilateral filter proposed in [1] as a solution. This
is discussed in the next section.
<Previous Page>
<Next Page>
Home