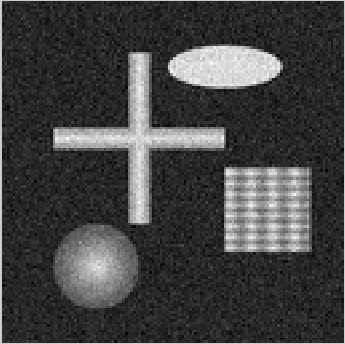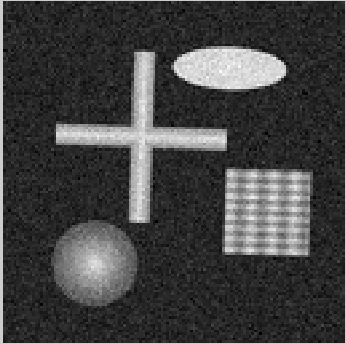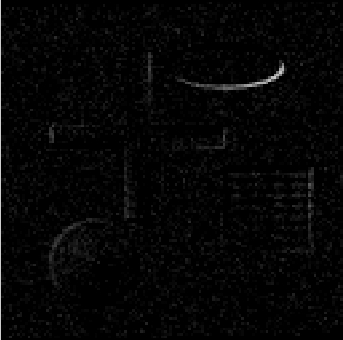
Algorithm performance on small rotations applied to the shape phantom (theta<=2 degrees). The format is the same as the previous figure. The theta shown for the affine registration is estimated from Sx and Sy. Note that the error is consistently higher for the affine registration.