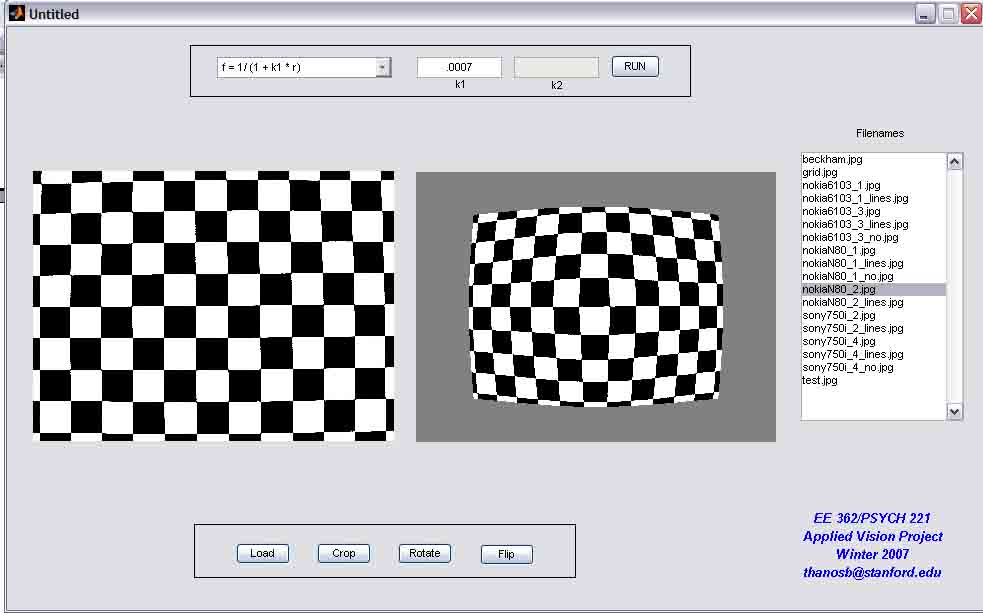
1. Introduction1.1 Image distortionA perfect lens used in a camera would render straight lines as straight, no matter where they occur. But, consumer digital cameras are equipped with lenses that are not that good, and this results to changes in the geometry of the image. These effects are really disturbing in applications such as architectural shots, where the maintenance of straight lines is of critical importance. Geometric distortion is an error on an image, between the actual image coordinates and the ideal image coordinates. There are different types of geometric distortion are classified into the two following categories.
In the following figures (Figure 1.1 and 1.2) we present the different types of internal and external geometric distortion. 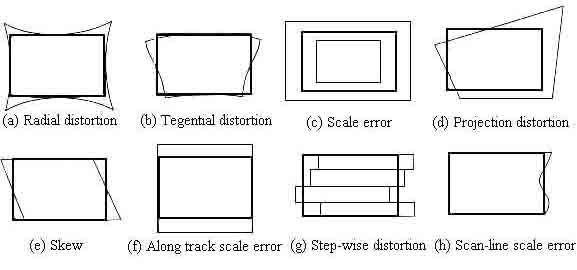
Figure 1.1: Internal Distortions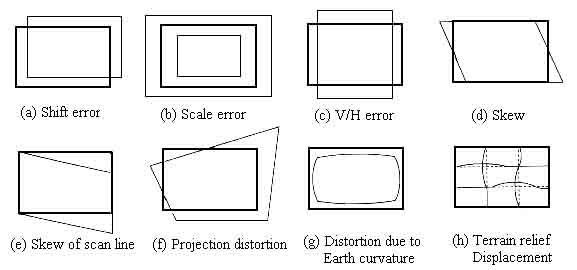
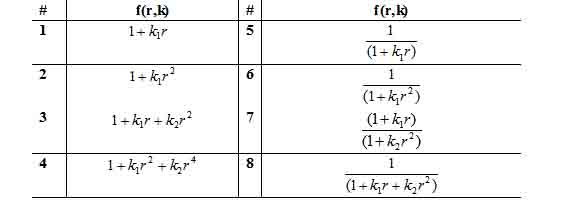
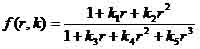
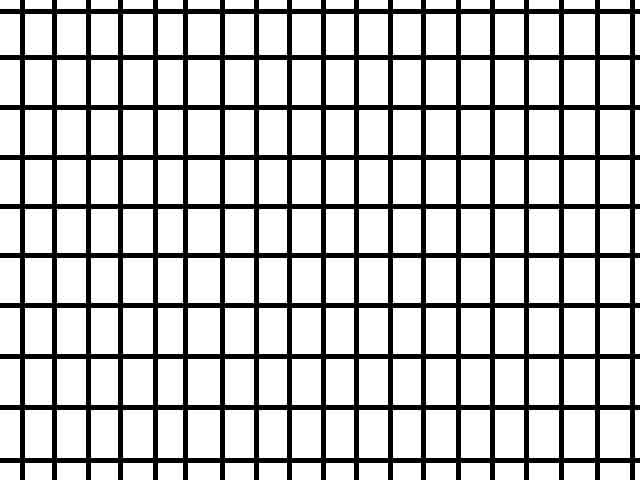
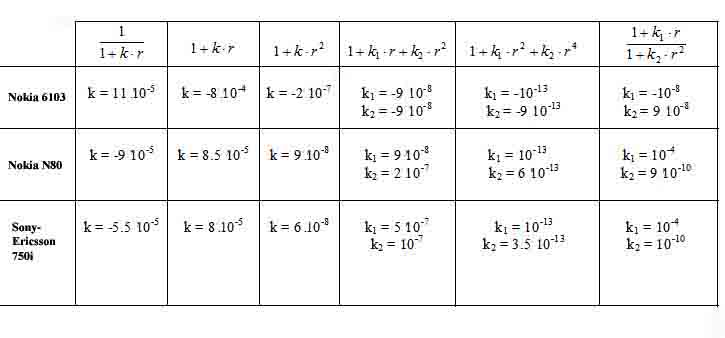
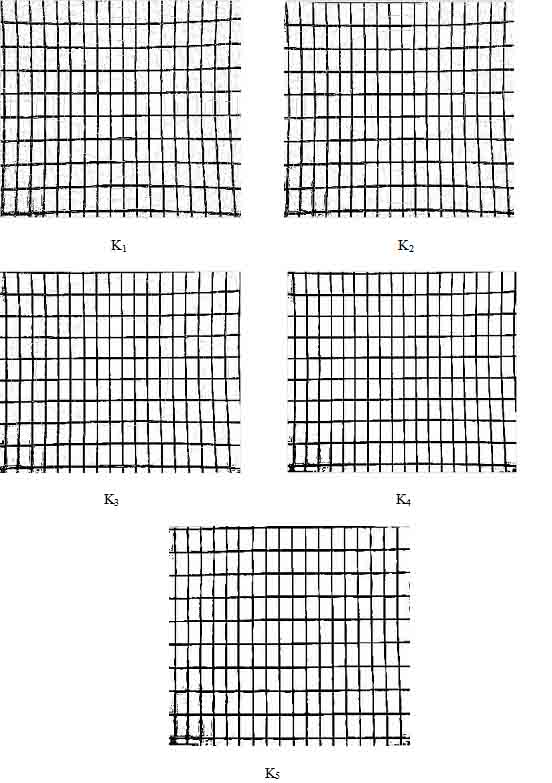
Figure 1.2 External DistortionsAmong the above nonlinear distortions, the radial distortion which is along the radial direction from the center of distortion, is the most severe and the most common. According to this type of geometric distortion, straight lines in the undistorted subject curve in the image taken by the camera. Straight lines that run through the image center (which in most of the cases is the same as the center of distortion) remain straight and a circle concentric with the image center remains a circle, although its radius is affected. Maybe the most typical cases of radial distortion are the barrel and the pin-cushion distortion, which we will analyze in a following section. This paper reports on a method for modeling radial distortion. We are going to use six different models of distortion and measure the effect of each one of them, firstly on a picture of a grid and then on real grayscale images. We will see how the values distortion coefficients affect the distortion applied on the images and then we are going to use these models in order to calculate the distortion applied to images taken by the camera of a mobile phone. 1.2 Lens backgroundA normal or standard lens is a lens that generates images that are generally held to have a "natural" perspective compared with lenses with longer or shorter focal lengths. In the case of this type of lenses, the exit angle of the image matches the entry angle, as shown in Figure 1.3.a. A wide-angle lens is a lens whose focal length is substantially shorter than the focal length of a normal lens for the image size produced by the camera, whether this is dictated by the dimensions of the image frame at the film plane for film cameras or dimensions of the photosensor for digital cameras. Finally, a telephoto lens is a specific construction of a long focal length photographic lens that places its optical center outside of its physical construction, such that the entire lens assembly is between the optical centre and the focal plane. In the cases of wide-angle and telephoto lenses, when the lens has a field of view greater or smaller, respectively, the entry and exit angles are no longer the same. With a wide field of view the image has to be squeezed into a smaller space, as shown in Figure 1.3.b. The result is that scale and distance proportions between foreground and background are increased, therefore appear smaller as the distance between them and the camera is increased. On the other hand, when we use a lens with a narrower field of view, which is the case of telephoto lens, the image needs to be stretched to fit the space, as shown in Figure 1.3.c. The perspective is distorted in this case as well, but in the opposite way. This means that scale and distance proportions between foreground and background diminish so that objects that are far away from the camera appear larger than they are and sometimes equal to those who are closer to the camera. The result of this effect is that these two categories of objects appear to have no distance between them, something of course that is in contrast to the reality. 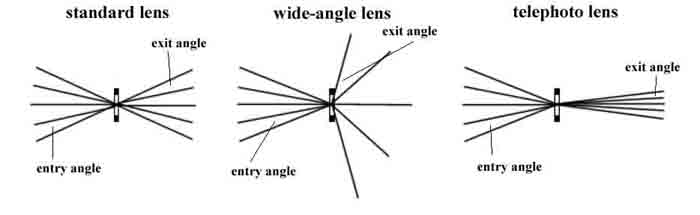
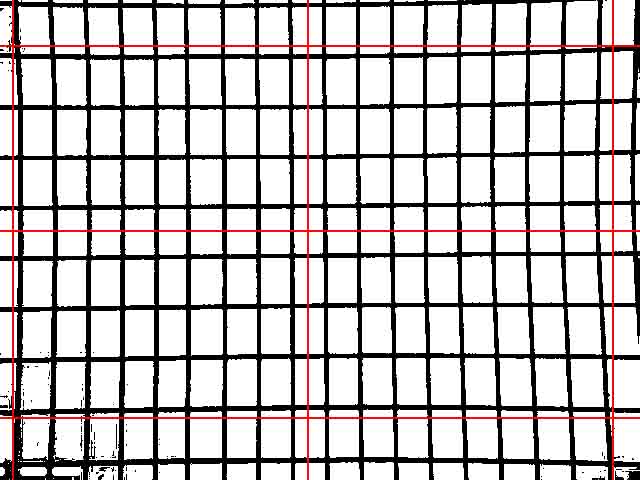
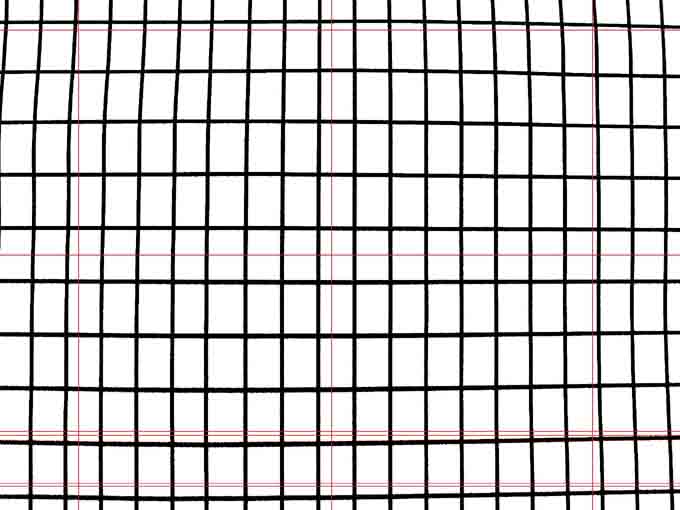
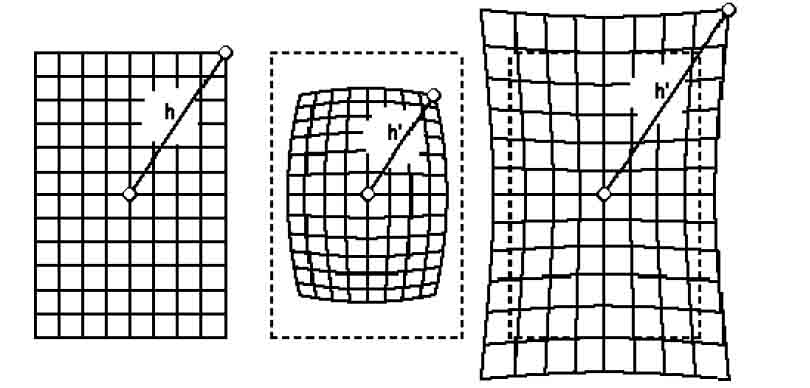
(a) (b) (c)Figure 1.3 Different types of lenses1.3 Barrel and Pin-cushion distortionThe two typical lens distortion that occur are called barrel and pin-cushion distortion. They are named by the effect that they have upon an image, as shown in Figure 1.4. Barrel distortion is found in wide-angle views and it is the result of the squeeze that is applied in order to fit the image in a smaller space. On the other hand, pin-cushion is found in telephoto because of the stretching applied in the image in order to feet the space. The squeezing and the stretching of images vary radially due to the design of the lenses, making these distortions visually most prominent at the image corners and sides. 
Figure 1.4 Original grid, barrel distortion and pin-cushion distortionCorrective lens elements are used to reduce these faults as much as possible and some lenses exhibit much less distortion than others. The quality of a lens, and it's type, single focal length or zoom, usually determine how much distortion occurs. Lenses with single focal length, also called prime lenses, tend to produce less distortions because there are fewer elements and less need for optical compromise and it can be optimized for it's particular focal length, while a zoom involves many elements and some compromise, and the wider the focal range, the more compromise is involved. All lenses produce distortions, but they are hardly seen in the very best lenses, whilst in the cheaper types they may be quite prominent. 
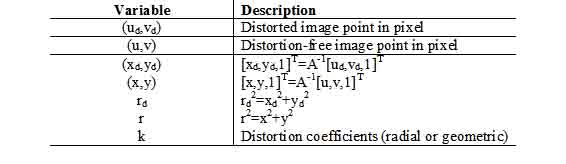
where
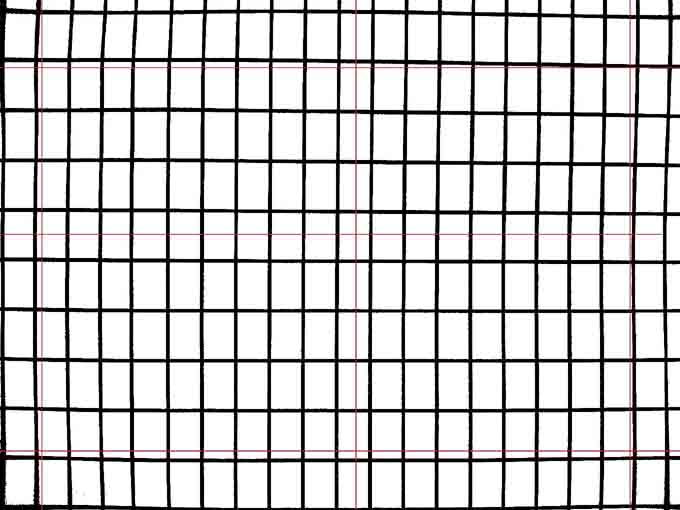
Beside the two types of distortion mentioned above, there are also other more complicated types of distortion produced by lenses. A very common high order distortion pattern introduced by real-world lenses is the one that varies from barrel to pin-cushion across the field of the image. This distortion pattern is presented in Figure 1.5. The effect of such lens design is to have a maximum distortion mid-field, while the edges display little or virtually no distortion. 
Figure 1.5 Higher order distortion1.4 Camera CalibrationAs we have mentioned previously, in practice, camera distortion could happen in a general geometrical manner that is not limited to the radial sense. Therefore, the commonly used radial distortion model for camera calibration is in fact an assumption or a restriction. For many computer vision applications the camera is usually assumed to be fully calibrated beforehand. Camera calibration is the estimation of a set of parameters that describes the camera's imaging process. With this set of parameters, a perspective projection matrix can directly link a point in the 3-D world reference frame to its undistorted projection on the image plane. This is given by the following: 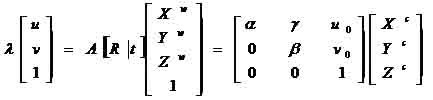
where (u, v) is the distortion-free image point on the image plane. The matrix A fully depends on the camera's five intrinsic parameters (α, γ, β, u0, v0) with (α, β) being two scalars in the two image axes, (u0, v0) the coordinates of the principal point, which generally fits in with the center of the image, and γ describing the skewness of the two image axes. [Xc, Yc, Zc]T denotes a point in the camera frame that is related to the corresponding point [Xw, Yw, Zw]T in the world reference frame by Pc = RPw + t, with (R,t) being the rotation matrix and the translation vector. In camera calibration, lens distortion is very important for accurate 3-D measurement [1]. The lens distortion introduces certain amount of nonlinear distortions, denoted by a function F in Figure 1.6, to the true image. The observed distorted image thus needs to go through the inverse function F-1 to output the corrected image. That is, the goal of lens undistortion, or image correction, is to achieve an overall one-to-one mapping. 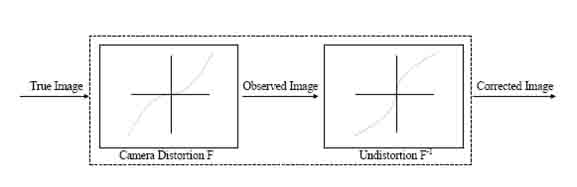
Figure 1.6 Distortion and Undistortion of imageBack on top |