.
where
·
For the sake of brevity we will omit much of the mathematical rigor
of this method, and stick to the formulas that are acutally implemented
in the code. We refer to the original paper for more detail.
In general, however, it is important to note that the interplay of the
theory to the algorithm essentially comes in in the 5th step below (iterative
improvement). Steps 1-3 merely define variables to be used when implementing
steps 4 and 5.
The steps taken to implement this method were as follows:
1)Define
.![]()
where
·![]() =
mean (expected value) for pth pixel (linear combination of mixels projected
near pixel location). Determined using [mixel values, registration,
PSF]. This means "given the values for the mixels and the parameters
relating mixels to pixels, it is possible to calculate the expected value
of a give pixel by summing the contribution of each mixel as weighted by
the PSF". This is essentially a mapping back from the mixels to the
pixels. Clearly this is not a "self-starting" function as we must
have the mixel values ahead of time.
=
mean (expected value) for pth pixel (linear combination of mixels projected
near pixel location). Determined using [mixel values, registration,
PSF]. This means "given the values for the mixels and the parameters
relating mixels to pixels, it is possible to calculate the expected value
of a give pixel by summing the contribution of each mixel as weighted by
the PSF". This is essentially a mapping back from the mixels to the
pixels. Clearly this is not a "self-starting" function as we must
have the mixel values ahead of time.
·![]() = mixel-pixel
weight defined by PSF and registration information
= mixel-pixel
weight defined by PSF and registration information
2)Define
.![]()
Where
·![]() =0
=0
·![]() =
= ![]() = ¼ if |i-j|=1 and 0 otherwise.
= ¼ if |i-j|=1 and 0 otherwise.
these are coefficients which define for us the importance of a mixel's
neighbors in determind what the value of the mixel is "expected" to be
based on the general property of small mixel-to-mixel variations.
3) Define
.![]()
as the mean value of all mixels. While not explicitly used in
steps 4 and 5 below, it is interesting to note that this method uses a
mean value for all mixels. This is perhaps a limitation on the kinds
of images that the method is useful for (i.e. not useful for images with
large variations)
4)Initial Composite
"First Guess". This is how we begin the process. Since this is
an iterative process, we need to jump-start it with something, and this
is a composite mixel image using information from all pixel frames.
mixels are computed by tallying "votes" of all pixels that could affect
it using a "weighted average" of all pixels from all frames mapped into
the mixel coordinate frame.
.
where
![]() are defined
exactly as in step 1, but it is IMPORTANT to note that in general, each
coefficient will have to be calculated independently due to the large numbers
of pixel-mixel and mixel-pixel calculations involved.
are defined
exactly as in step 1, but it is IMPORTANT to note that in general, each
coefficient will have to be calculated independently due to the large numbers
of pixel-mixel and mixel-pixel calculations involved.
5) Iterative Improvement
.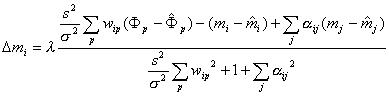
where
·![]() regulates the amount
that m can change purely for numerical stability
regulates the amount
that m can change purely for numerical stability
·s is the mixel deviation. This is typically difficult
to deal with. They mention recalculating it throughout the iterations
using representative patches of mixel image
·![]() is the pixel deviation.
Assumed to be the same for all pixels in an image
is the pixel deviation.
Assumed to be the same for all pixels in an image
· ratio of ![]() is the ratio of mixel to pixel deviation
is the ratio of mixel to pixel deviation
It is easy to see the statistical nature of this method. Our process is begun by a weighted average to guess the mixel values. This guess, incidentally, does typically produce good results as Cheeseman noted, but, in Matlab at least, is a very slow thing to compute (though not detrimentally slow.) In the iterative improvement we can again see the statistical nature. Note that the top of the equation is composed of